Equipo [S.I.M.B.A. - Simulador de Intensidad de Movimiento Biaxial] Santiago García Calzada , Catherine Sarai Marina Ramirez
S.I.M.B.A. es un equipo construido para emular sismos a escala. Sirve para proporcionar un entorno controlado en donde se puede observar el funcionamiento de la interacción e influencia de las fuerzas inerciales con las construcciones e infraestructuras. La plataforma de ensayo cuenta con una arquitectura biaxial articulada, la cual se apoya en un mecanismo de seguidores y rieles que hacen que la rotación de motores de 9V posean una traslación a movimientos lineales continuos en dos ejes al mismo tiempo. La arquitectura del dispositivo está basada en un sistema de transmisión de energía a través de levas que empujan la plataforma en dos ejes de forma continua. El equipo tiene una regulación en la potencia de accionamiento de los motores de manera independiente para así obtener el efecto del simular un amplio espectro de magnitudes y direcciones.
S.I.M.B.A. is a device engineered to emulate seismic events on a scale. It provides a controlled environment to observe the interaction and influence of inertial forces on buildings and infrastructure. The testing platform features an articulated biaxial architecture, supported by a follower and rail mechanism that converts the rotation of 9V motors into continuous linear motion across two axes simultaneously. The device’s architecture is based on a power transmission system utilizing cams that continuously drive the platform in two directions. The system allows for independent regulation of each motor’s output power, enabling the simulation of a wide spectrum of seismic magnitudes and orientations.
Ni S.I.M.B.A. se ueyi tlamachijchiualistli tlen kinextia keniuj olinij tlaltepaktli. Ika motors uan teposimej kiyoltilia ueyij olinimej para kiitasej keniuj uetseij uan mopolouaj kalmej. Ni tlamanextili kiyekana kuali tlanonotsalistli para mochiuasej kuali kalmej uan kuali tlamanauisej kema ueyi olinij tlaltepaktli uan mopolouaj tlamantli.
Terremoto
La corteza del manto superior está compuesta por placas que se mueven entre sí. Este proceso se denomina tectónica de placas. Cuando dos placas se separan se producen grietas en la corteza. Cuando las placas se mueven una hacia la otra puede originar actividad sísmica. Las placas también pueden deslizarse una sobre otra, que es lo que ocurre, por ejemplo, en la falla de San Andrés (figura 1).

Figura 1. Falla de San Andrés en Carrizo Plain. De “Wikimedia Commons” por Ikluft, 16 de noviembre de 2007, (https://commons.wikimedia.org/wiki/File:Kluft-photo-Carrizo-Plain-Nov-2007-Img_0327.jpg). Licencia CC BY-SA 4.0. [1].
Un terremoto se define como las vibraciones de la Tierra causadas por la liberación repentina de energía bajo la superficie, por lo general como resultado del desplazamiento de rocas a lo largo de discontinuidades en las fallas. Después de un terremoto, los ajustes a lo largo de una falla suelen producir una serie de sismos conocidos como réplicas. En su mayoría, estas son menos fuertes que el sacudimiento principal, pero pueden causar considerable daño a estructuras ya debilitadas.
La destrucción resultante de los terremotos es causada por dos tipos diferentes de ondas sísmicas:
las ondas de cuerpo, que viajan a través de la Tierra y son parecidas a las ondas de sonido, y las ondas superficiales, las cuales viajan sólo por la superficie de la tierra y son análogas a las olas oceánicas. Las velocidades de las ondas son determinadas por la densidad y elasticidad de los materiales a través de los cuales viajan.
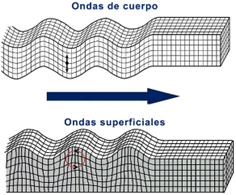
Figura 2. Movimiento de las ondas sísmicas superficiales. Adaptado de “Wikimedia Commons” por LukeTriton et al., 4 de julio de 2023. Basado en Bačić et al. (2020). Licencia CC BY 4.0. [2].
Biela – Manivela
El mecanismo de biela – manivela se describe como un mecanismo plano, con un grado de libertad que convierte energía rotacional de un elemento llamado manivela a otro llamado corredera, mediante un elemento llamado biela. La relación biela – manivela es radio – desplazamiento lineal (r/l) y es una función de aceleración. La relación biela – manivela, r – l, debe ser mayor o igual a 2 para obtener ángulos de transmisión aceptables en el mecanismo de manivela-corredera. La carrera S se defi ne como la distancia recorrida por el pistón y es dos veces el radio de la manivela, C = 2r.

Figura 3. Sistema biela – manivela.
SIMBA nace ante la necesidad de mostrar fenómenos geofísicos complejos de una manera controlada, en un contexto donde la seguridad de estructuras es prioritaria. A diferencia de modelos unidireccionales, el proyecto permite generar aceleraciones simultaneas en dos direcciones lo que permite simular de manera más precisa la naturaleza de las ondas sísmicas proporcionando una herramienta eficaz, precisa y de bajo costo para poder replicar fenómenos sísmicos en tiempo real dentro del aula.
Si bien México es uno de los países con mayor actividad sísmica, la cultura de prevención y seguridad ante los fenómenos sísmicos aún no ha alcanzado un nivel de madurez adecuado. Por otro lado, las instituciones educativas de nivel medio superior usualmente no cuentan con los recursos necesarios para comprender de manera interactiva los fenómenos sísmicos. A su vez los dispositivos didácticos en su mayoría se limitan a movimientos en un solo eje. Por lo tanto, SIMBA se presenta como una alternativa capaz de replicar con precisión movimiento en los ejes X y Y permitiendo analizar el comportamiento de estructuras y las posibles fallas que podrían presentar.
Al implementar una plataforma de dos niveles sobre rieles guiados independientes en dos direcciones, conectados a un sistema de biela-manivela alimentado por un motor de corriente continua de 9V en cada nivel y controlado por un módulo de control de velocidad PWM, la rotación de la manivela será transferida a la biela en forma de desplazamiento lineal, simulando ondas sísmicas. Por lo tanto, todo el sistema será capaz de someter a aceleraciones las estructuras y así identificar fallas en su diseño y posibles mejoras.
Diseñar y construir un prototipo de simulación sísmica biaxial, mediante el uso de una estructura de madera con rieles guiados en dos direcciones y un sistema biela – manivela automatizada, para analizar la respuesta en modelos estructurales a escala.
La evolución de los análisis generados por los sistemas de simulación sísmica ha pasado de un mecanismo manual de impacto único a un sistema de oscilación cíclica controlada. La técnica tradicional se restringe a simuladores unidireccionales que, si bien permiten observar la resonancia básica, carecen de dar cuenta de los vectores de fuerza transversales que se producen durante un evento sísmico. SIMBA se sitúa en la frontera de lo que se considera la tecnología didáctica de la educación sísmica, dado que es capaz de implementar una Arquitectura de Planos Ortogonales Superpuestos, que complementa la independencia de los ejes X y Y superando los límites de la técnica tradicional en uno solo de los grados de libertad. También, la integración de un sistema de biela – manivela, se traduce en un sistema optimizado de transferencia de energía de los motores de 9V, eliminando el comportamiento errático de movimiento tenso. El uso de un riel de baja fricción sobre una base de madera de alta densidad resuelve técnicamente la misma irregularidad de las vibraciones parásitas, de modo que el análisis estructural permita centrarse exclusivamente en la activación de la respuesta sísmica en 2 ejes sólo.
El desarrollo del Simulador de Intensidad de Movimiento Biaxial Articulado (SIMBA) se basa en un diseño de maquinaria con un enfoque en la estabilidad dinámica y la repetibilidad de los experimentos. El sistema se implantó a partir de la integración técnica de tres sistemas trascedentes: el soporte estructural, el mecanismo de transmisión y el sistema de regulador potencia.
Configuración del soporte principal y plataformas de ensayo.
La base principal es de madera de alta densidad de 50 cm x 50 cm lo cual garantiza que todo el sistema permanezca estable.
Sobre la base, se instalaron rieles metálicos de aluminio. La primera plataforma (eje X) es de madera de baja densidad de 38 cm x 38 cm la cual se desplaza sobre la base fija. Dicha plataforma cuenta con 4 patines de aluminio alineados con los rieles en la base. A su vez, se instalaron rieles de aluminio sobre la primera plataforma a 90° con respecto a los rieles de la base. La segunda plataforma (eje Y) es de madera de baja densidad de 30 cm x 30 cm se desliza sobre la primera.
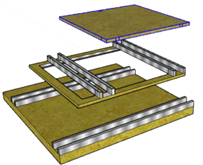
Figura 4. Configuración de las plataformas. En la parte más baja se encuentra la base principal con los rieles de desplazamiento. En medio, la plataforma 1 con los rieles a 90° para la plataforma 2, formando un sistema biaxial.
Implementación del Sistema de biela – manivela
Para generar el movimiento, se diseñó un mecanismo biela-manivela. Se utilizaron discos de transmisión acoplados a los motores de 9V CC. El radio de la manivela se calculó de 2 cm en la primera plataforma y de 1 cm en la segunda plataforma para proporcionar una amplitud de oscilación de 2 y 4 cm respectivamente, utilizando la formula C = 2r, donde C = Distancia recorrida lineal y r = radio de la manivela.
Se coloco uno de los sistemas la base principal utilizando abrazaderas. El segundo sistema se coloco sobre la primera plataforma con el brazo de la manivela conectado a la segunda plataforma.
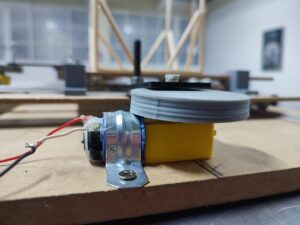
Figura 5 . Sistema biela – manivela.
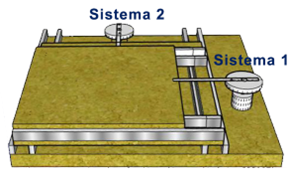
Figura 6. Implementación del sistema de desplazamiento alimentado por motores de 9V CC,
Regulación de la velocidad de los motores y desplazamiento lineal.
La última fase consistió en el ajuste de la intensidad mediante la Modulación por Ancho de Pulso (PWM). Para esto, se instalaron módulos PWM (figura 6) prefabricados entre la fuente de alimentación y los motores de 9V CC. Se realizaron pruebas de calibración para determinar el correcto funcionamiento del motor en la base principal y no sufriera sobrecalentamiento al mover todo el peso de la plataforma de ensayo. El control PWM permitió variar la frecuencia de sismo en tiempo real.

Figura 7. Modulo Pwm Controlador De Motor 90w 5a 3-35 V.
Modelos Estructurales (Maquetas)
Para las pruebas en SIMBA se idearon estructuras mediante palos de madera. Se eligió esta madera, por su elasticidad ya que permite obtener visibilidad de las flexiones, de manera que resulta adecuado en las prácticas de aula. Las maquetas se ensamblaron por uniones rígidas con silicón caliente para simular marcos de hormigón armado.

Figura 8. Modelo estructural para ser ensayado en SIMBA.
Desempeño Mecánico
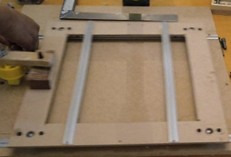
Figura 9. Primera plataforma en funcionamiento. Se observa un movimiento suave y constante.

Figura 10. Sistema de rieles y rodamiento.

Figura 11. Sistema antidescarrilamiento.

Figura 12. Simulador de Intensidad de Movimiento Biaxial Articulado.
Comportamiento de las Maquetas
Se produjo respuesta en función de la intensidad:

Figura 13. Modelo estructural en fase de ruptura.
Se diseño y construyo un prototipo de simulación sísmica biaxial, mediante el uso de una estructura de madera de alta densidad en su base y baja densidad en las plataformas uno y dos. Se usaron mecanismos de transmisión para transformar el movimiento giratorio de dos motores de 9V CC a un disco de manivela con un radio de 1 cm y 2 cm y un desplazamiento lineal de 2 cm y 4 cm respectivamente. Se implementaron módulos PWM para la regulación de la frecuencia y amplitud de las oscilaciones de cada eje de manera independiente. Se evaluó la respuesta de diferentes modelos de madera ante sismos biaxiales encontrando patrones de fallo y fatiga de los materiales y la estructura. Por último, se obtuvo una herramienta de bajo costo para que los estudiantes de preparatoria pudieran observar fenómenos físicos tales como la inercia, la frecuencia y el amortiguamiento.
[1] Ikluft. (2007). San Andreas Fault in the Carrizo Plain, aerial view from 8500 feet altitude [Fotografía]. Wikimedia Commons. https://commons.wikimedia.org/wiki/File:San_Andreas_Fault_Carrizo_Plain.jpg
[2] LukeTriton, Earle, S., Bačić, M., Librić, L., Jurić Kaćunić, D., & Kovačević, M. S. (2023). Seismic surface waves: Rayleigh and Love waves [Diagrama]. Wikimedia Commons.
[3] Molina Iglesias, L. E. (Dir.), & Navarro, J. (Dir. de la obra). (2004). Educ@ando. Enciclopedia temática para todos: Vol. 4. Geografía general, matemáticas, computación. Editorial Reymo.
[4] Diccionario visual altea de la tierra. (1994). Santillana
[5] Wicander, R., & Monroe, J. S. (2000). Fundamentos de geología (2ª ed.). Thomson.
[6] Banqueri Forns-Samsó, E. (2007). Apuntes de geografía física. Parramón Ediciones.
[7] Norton, R. L., (2009). Diseño de Maquinaria. Síntesis y análisis de máquinas y mecanismos (4a edición). Mc Graw Hill.
[8] Shigley, J. E., & Uicker, J. J., Jr. (1988). Teoría de máquinas y mecanismos. McGraw-Hill/Interamericana de México.
{kind=link}